Research Projects
"How to make robots more safe?"
The central motivation of my research is to develop provably safe decision-making algorithms for robotic systems. I focus on identifying potential failure modes within robotic algorithms as they interact with their environment through multimodal sensors including images, point clouds, haptics, and language. This knowledge serves as a foundation for enhancing underlying algorithms, ultimately yielding robust and safe autonomous systems. For an overview of my research philosophy and future goals, please take a look at my Research Statement.
Safety and Recovery Algorithms for System Level AV Perception Failures
Keywords: Safety Evaluation, Self-driving Cars, Real-time Systems
We propose methods to enhance the safe operation of autonomous vehicles in dynamic environments, particularly during sensor failures. Our approach incorporates feedback from a runtime monitor to mitigate the impact of missed obstacles on AV planning and control, acting as a safety filter and plan repair system using lightweight transformer-based models designed for real-time operation.
RELATED PUBLICATIONS:
- RA-L / ICRA '26 Safety Evaluation of Motion Plans Using Trajectory Predictors as Forward Reachable Set Estimators
- ICRA '25 Safety and Recovery Algorithms for System Level Autonomous Vehicle Perception Failures
Failure Mitigation of Visual Navigation Systems
Keywords: Vision-based Control, Safety Analysis, ML Safety
We develop methods to ensure the safety of robotic systems with machine learning-driven controllers using visual inputs. Our approach identifies and mitigates potential system-level failures through innovative techniques including reachability analysis and anomaly detection. By systematically analyzing vision-based controller behavior, we enhance system safety and reliability in real-world applications, particularly in unpredictable environments.
RELATED PUBLICATIONS:
- ArXiv '24 Enhancing Safety and Robustness of Vision-Based Controllers
- ICRA '24 Detecting and Mitigating System-Level Anomalies of Vision-Based Controllers
- Allerton '23 Learning and Detecting Failures of Visual Navigation Algorithms
- RA-L, IROS '23 Finding Failure Cases for Vision-Based Controller. Video Presentation
Navigation Using Contact Mechanics
Keywords: Legged Robotics, Contact Mechanics, Passive Dynamics
We present a novel approach for multi-legged robots to utilize leg-obstacle collisions to generate desired dynamics. Our method demonstrates that an open-loop quadrupedal robot can achieve desired orientations within a periodic obstacle field without any sensory input or active steering, leveraging passive contact mechanics for navigation control.
RELATED PUBLICATIONS:
- RA-L, IROS '22 Obstacle Aided Path Planning for Multi-Legged Robots
- APS '22 Contact Mechanics in Legged Robot Navigation
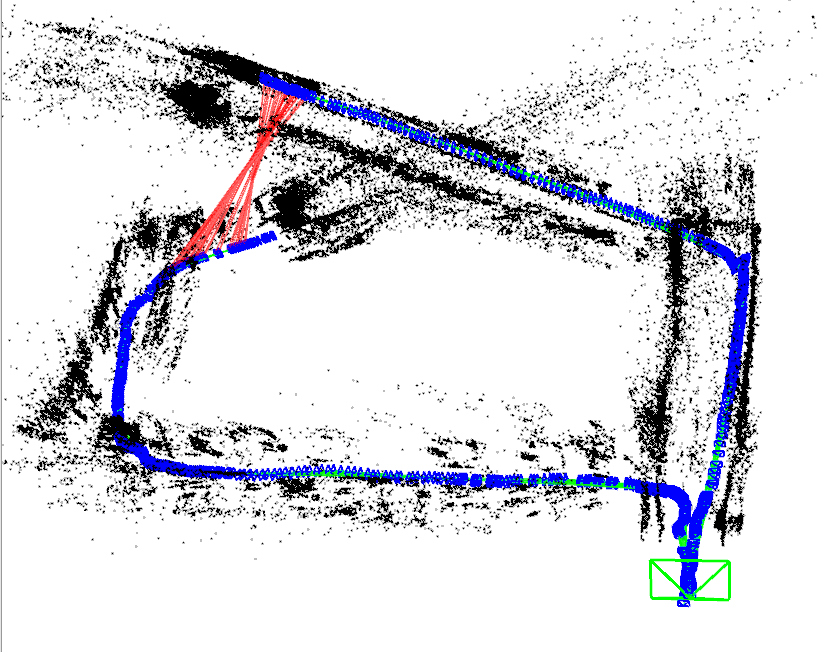
Multi-Agent ORB-SLAM
Keywords: SLAM, Multi-Agent Systems, Computer Vision, Robotics
A collaborative ORB-SLAM implementation that enhances the open-source ORB-SLAM2 system for multi-agent operation. The system enables multiple robots to collect data more quickly and cover greater areas by merging maps online at loop closure points. Features robot-to-robot loop closure mechanism using APRIL tags for easy detection and additional constraints, resulting in increased coverage within shorter durations while operating real-time in both indoor and outdoor environments.
PROJECT DETAILS:
- Project Website Multi-Agent ORB-SLAM Implementation